My Projects
ROS2 Mobile Robot Simulation
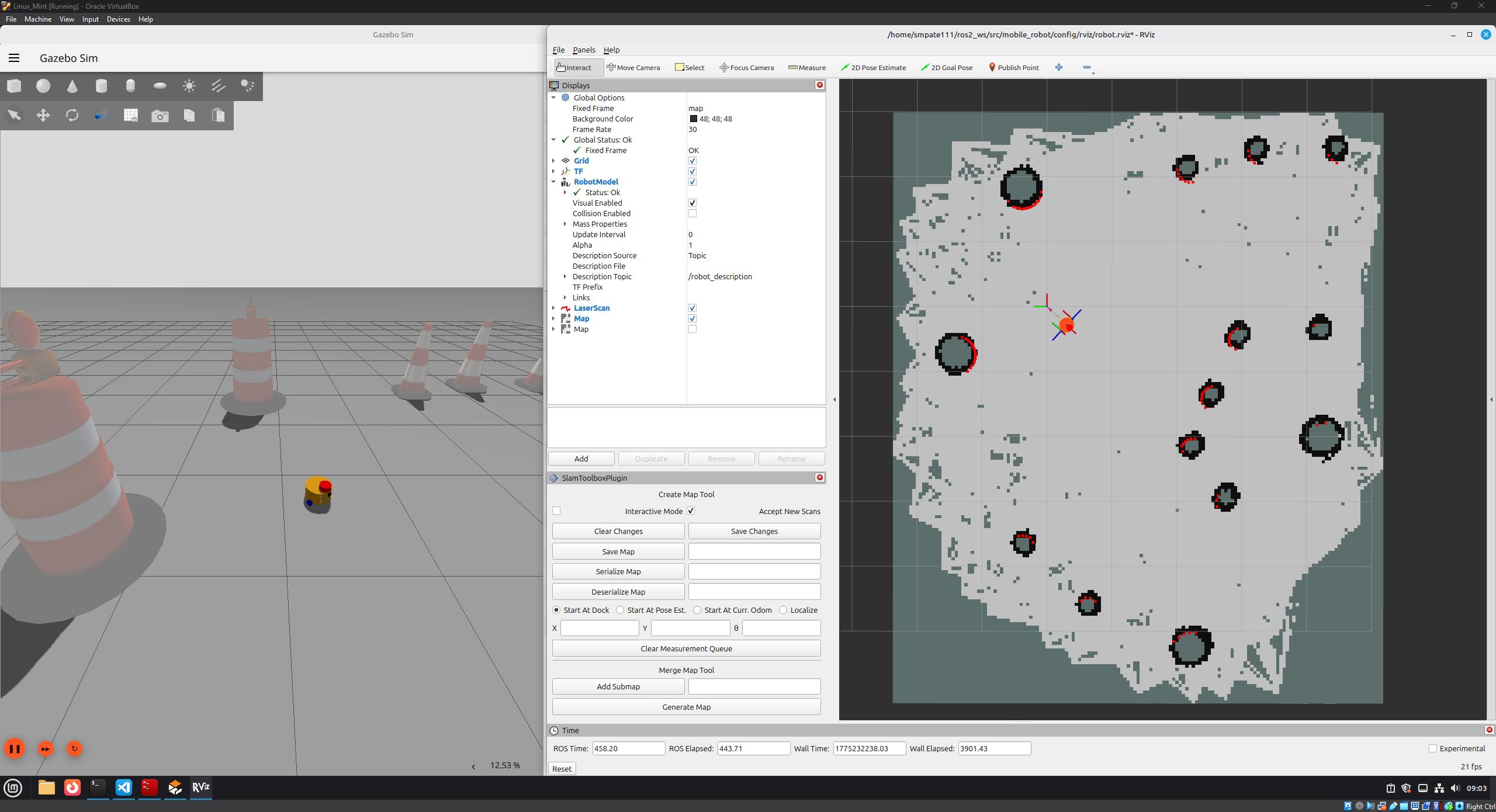
Engineered a differential drive mobile robot in ROS2 by modeling rigid body dynamics, joint kinematics, and collision geometries using URDF. Established a simulation environment in Gazebo to test autonomous capabilities by integrating slam_toolbox for mapping and localization and Nav2 for path planning and obstacle avoidance.
- Python
- ROS2
- RViz (ROS2 3D Visualizer)
- Gazebo (Physics Simulator)
- URDF (Robot Modeling)
- slam_toolbox (Mapping & Localization)
- Nav2 (Autonomous Navigation)

Diabetes Risk Predictor
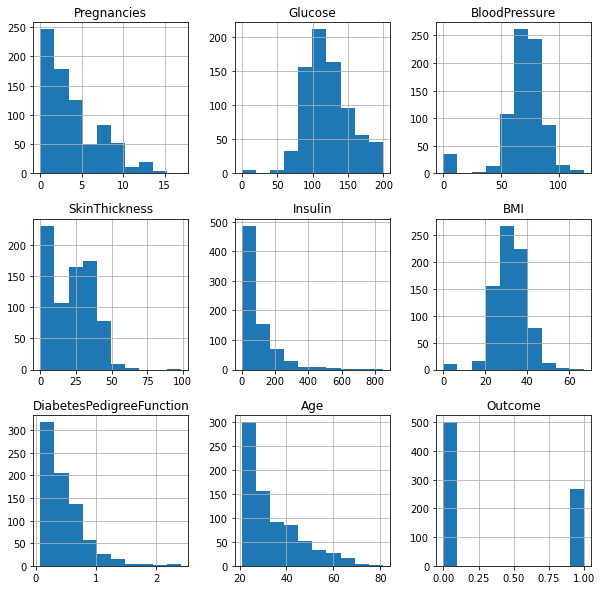
Created a comparative machine learning framework that predicts diabetes risk which features a custom Gaussian Naive Bayes implementation built from scratch using NumPy. Benchmarked the model against the Scikit-Learn's library across two clinical datasets by utilizing 10-fold Cross-Validation to ensure the model's robustness and achieve high performance across Accuracy, Precision, Recall, and F1-Score.
- Python
- NumPy
- pandas
- Matplotlib
- scikit-learn (sklearn)
Parkinson's Disease Predictor
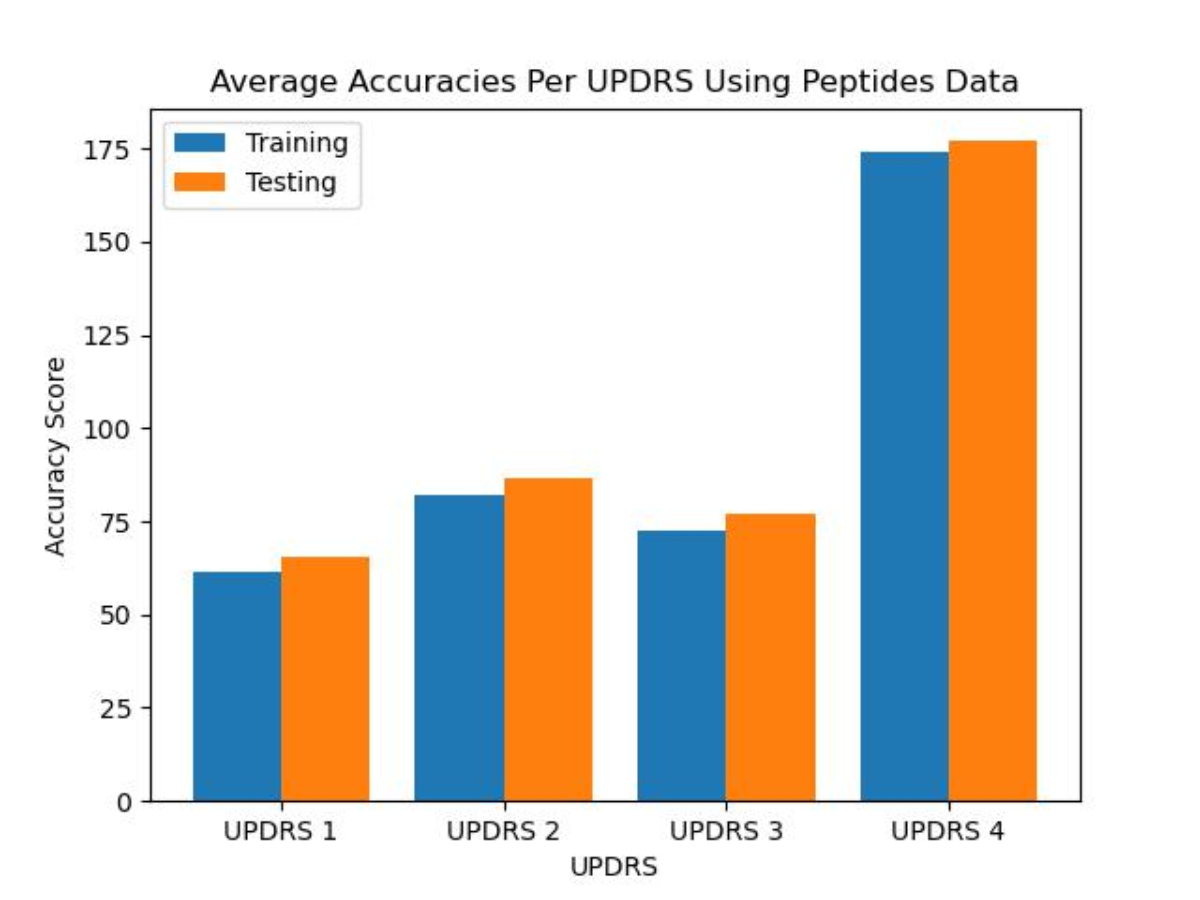
Developed a high-performance machine learning algorithm for the AMP®-Parkinson's Disease Progression Prediction Kaggle competition to forecast MDS-UPDRS scores. Designed a feature set by pivoting and aggregating large-scale biological datasets that includes over 980,000 peptide records and 230,000 protein expression entries. Implemented an XGBoost regressor optimized via GridSearchCV and K-Fold cross-validation to capture complex biomarkers and track the disease's severity levels across clinical visits.
- Python
- NumPy
- pandas
- Matplotlib
- scikit-learn (sklearn)
- os
- XGBoost
Multi-Robot Systems: Pattern Formation
Built a multi-robot swarm simulation based on Crag Reynolds' Boids algorithm that implements emergent pattern formation through separation, alignment, and cohesion rules. Designed custom steering behaviors for dynamic obstacle avoidance and boundary constraints by utilizing sensor logic to ensure smooth and collision-free trajectories in a 2D environment. Integrated Matplotlib and p5 to perform real-time kinematic visualization and post-simulation data analysis to evaluate swarm equilibrium and positional stablility across 10 autonomous robots.
- Python
- NumPy
- math
- Matplotlib
- p5

Robotics 1 Labs
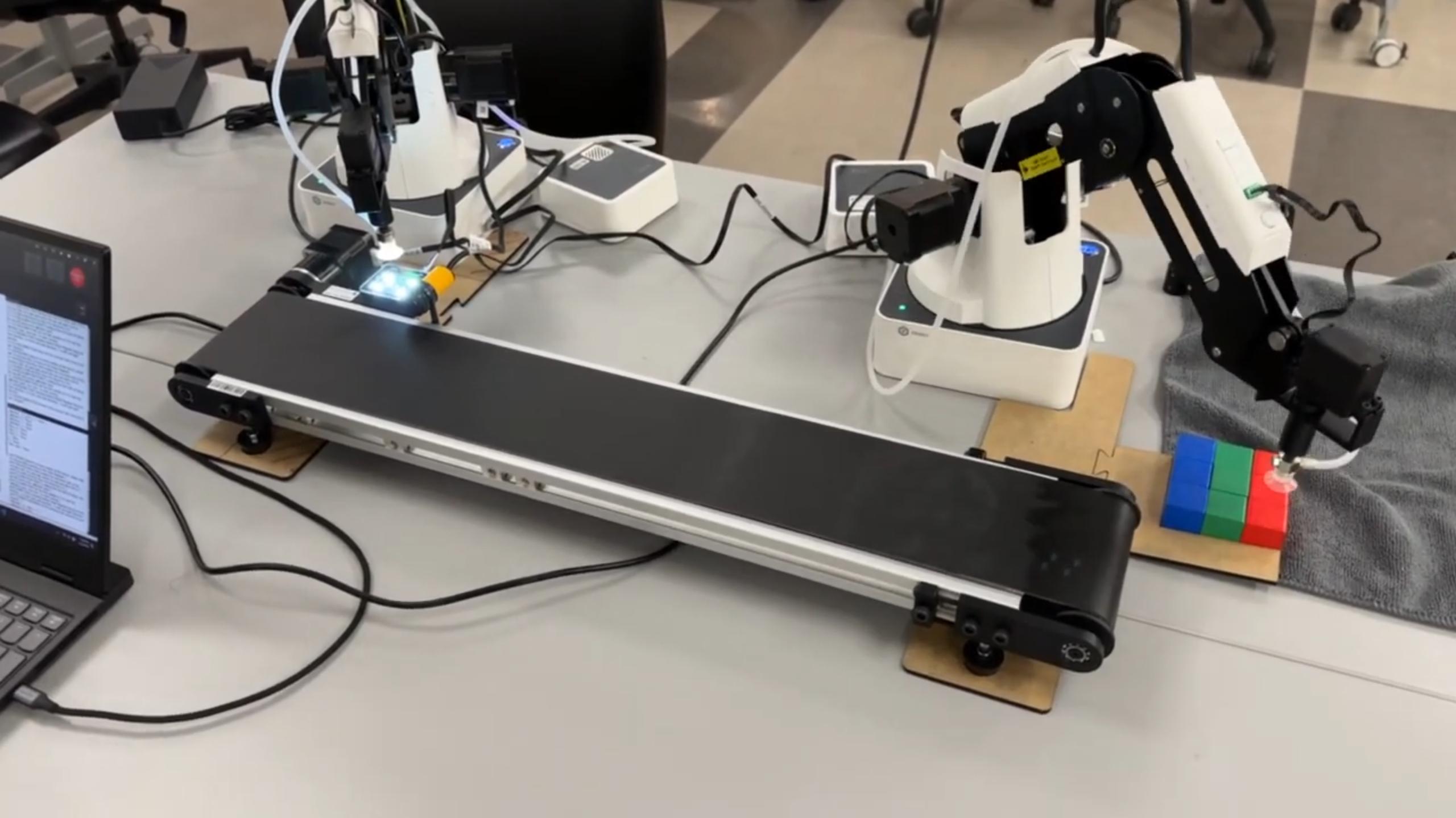
This robotics course comprised a series of technical labs focused on the precision control of industrial robotic arms that covers core topics such as coordinate system calibration and trajectory planning. By utilizing various end-effectors, I successfully executed complex tasks including automated writing, multi-axis block stacking, and pick-and-place operations. These labs demonstrated a comprehensive understanding of robotic kinematics, tool-path programming, and integration of specialized tools for various manufacturing objectives.
- Python
- Dobot Studio
- Dobot Magician
- Blockly
Discord NASA APOD Bot
Created a Discord bot that automates the distribution of space images by integrating NASA's Astronomy Picture of the Day (APOD) API. Utilized the discord and asyncio libraries to have the bot manage scheduling logic that delivers high-resolution imagery, descriptions, and metadata to multiple servers simultaneously at a synchronized daily time.
- Python
- Discord
- datetime
- requests
- asyncio

